Applied Control Systems 2: autonomous cars (360 tracking)
system modeling + state space systems + Model Predictive Control + MPC constraints + Python simulation: autonomous cars
4.60 (135 reviews)

4,074
students
13.5 hours
content
May 2024
last update
$84.99
regular price
What you will learn
revision of Model Predictive Control for Linear Time Invariant (LTI) systems
mathematical modeling of an autonomous car on a 2D X-Y plane using the bicycle model
going from the vehicle's equations of motion to its state space form
mastering & applying linear Model Predictive Control (MPC) to a nonlinear system using Linear Parameter Varying (LPV) formulation
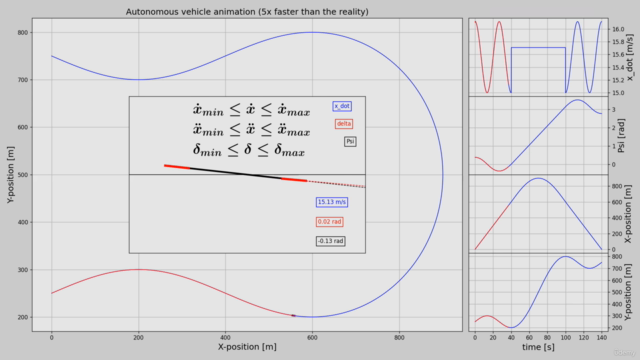
mastering & applying Model Predictive Control (MPC) constraints to the autonomous car
simulating the control loop for the autonomous car in Python including the Model Predictive Control (MPC) controller and its constraints
Screenshots



Related Topics
4095944
udemy ID
6/2/2021
course created date
10/23/2021
course indexed date
Bot
course submited by