Applied Control Systems 3: UAV drone (3D Dynamics & control)
Modeling + state space systems + Model Predictive Control + feedback control + Python simulation: UAV quadcopter drone
4.66 (429 reviews)

6,988
students
27.5 hours
content
Feb 2025
last update
$79.99
regular price
What you will learn
mathematical modelling of a UAV quadcopter drone
obtaining kinematic equations: Rotation & Transfer matrices
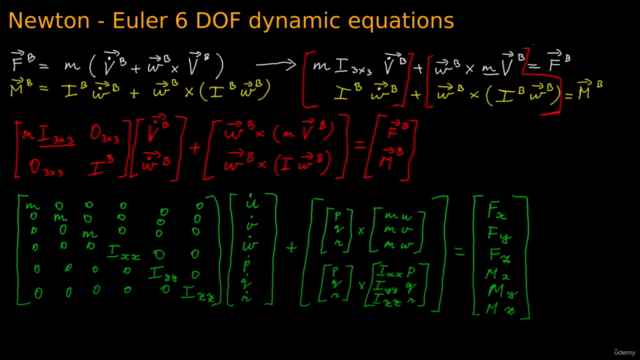
obtaining Newton-Euler 6 DOF dynamic equations of motion with rotating frames
going from equations of motion to a UAV specific state-space equations
understanding the gyroscopic effect & applying it to the UAV model
understanding the Runge-Kutta integrator and applying it to the UAV model
mastering & applying Model Predictive Control algorithm to the UAV
mastering & applying a feedback linearization controller to the UAV
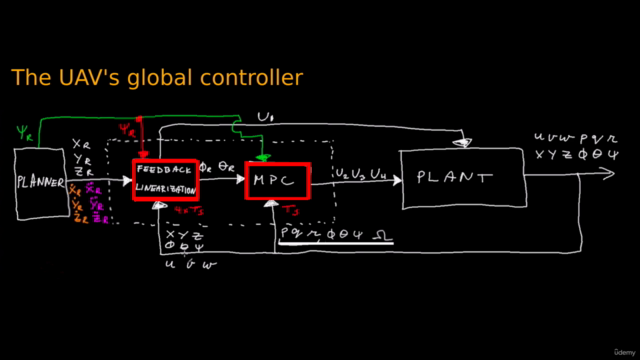
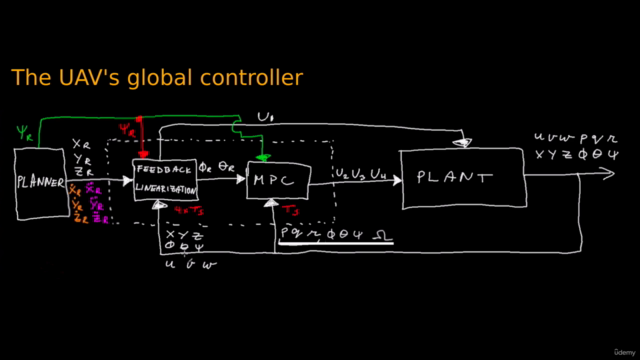
combining Model Predictive Control and feedback linearization in one global controller
simulating the drone's trajectory tracking in Python using the MPC and feedback linearization controller
Screenshots

Related Topics
3357352
udemy ID
7/23/2020
course created date
12/18/2020
course indexed date
Bot
course submited by